
School of Electronic Information and Electrical Engineering,
Shanghai Jiao Tong University, Shanghai 200240, China.
*Corresponding author: Liangshun Wu
School of Electronic Information and Electrical Engineering,
Shanghai Jiao Tong University, Shanghai 200240, China.
Email: wuliangshun@sjtu.edu.cn
Received: August 16, 2024
Accepted: September 10, 2024
Published Online: September 18, 2024
Journal: Journal of Artificial Intelligence & Robotics
Copyright: ©Liangshun W (2024). This Article is distributed under the terms of Creative Commons Attribution 4.0 International License.
Citation: Liangshun W, Peilin L, Rendong Y. Brain-inspired chips for future robots. J Artif Intell Robot. 2024; 1(1): 1003.
As robotics and Artificial Intelligence (AI) continue to evolve, the demand for more efficient and adaptable systems has become increasingly pressing. Traditional silicon-based processors, while powerful, struggle to manage the complexities and real-time tasks required in advanced robotics. In response to these challenges, brain-inspired chips, or neuromorphic processors, have emerged as a groundbreaking solution. These chips draw inspiration from the architecture and functionality of the human brain, utilizing Spiking Neural Networks (SNNs) to emulate neural processing. This commentary explores the principles behind neuromorphic computing, its advantages, and its potential applications in the future of robotics.
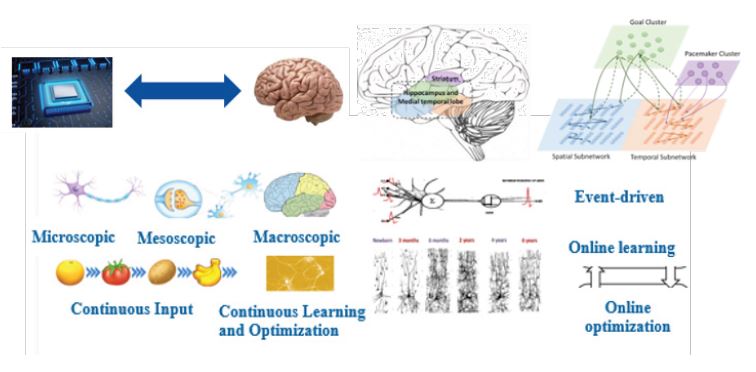
Neuromorphic computing is a paradigm that mimics the structure and function of biological neural systems. Unlike conventional computing architectures, which separate memory and processing, neuromorphic chips integrate these functions, resembling the interconnected nature of neurons in the brain. This integration allows for more efficient data processing and energy consumption.
Spiking neural networks
At the core of neuromorphic computing are Spiking Neural Networks (SNNs), which process information using discrete events known as spikes. Biological neurons communicate through these spikes, transmitting signals only when necessary. This event-driven approach minimizes energy expenditure, as it avoids the constant processing of irrelevant information. In contrast, traditional Deep Neural Networks (DNNs) operate continuously, often leading to significant energy waste.
SNNs are particularly advantageous for tasks involving dynamic and temporal data, such as video processing or robotic control. They can capture the rich spatiotemporal information inherent in these tasks, making them well-suited for real-time applications in robotics. The ability to process information asynchronously also allows SNNs to adapt more readily to changing environments, a critical requirement for autonomous robots.
Energy efficiency and performance
One of the most compelling advantages of neuromorphic chips is their energy efficiency. Research has shown that these processors can achieve performance levels comparable to traditional GPUs while consuming significantly less power. For instance, a recent study demonstrated that a drone equipped with a neuromorphic processor could process data up to 64 times faster and consume three times less energy than when using a conventional GPU setup [1,2]. This efficiency is crucial for small, autonomous robots that have limited power resources.
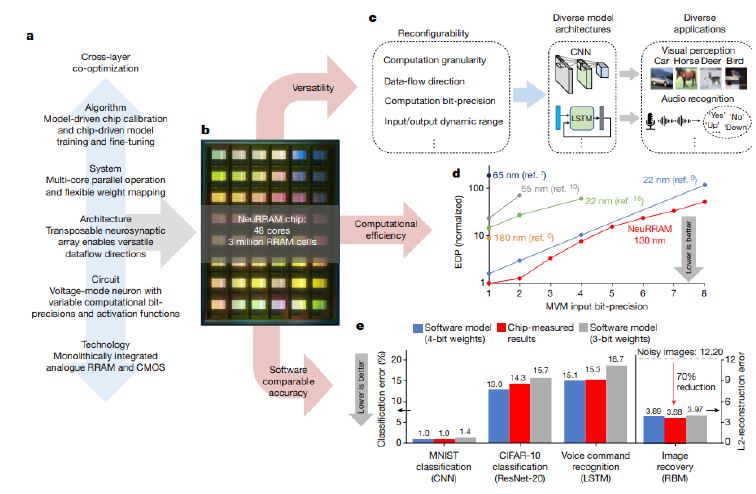
Moreover, the analog nature of neuromorphic chips allows them to perform computations in a manner that is inherently more efficient than digital systems. For example, the new NeuRRAM chip, which incorporates resistive RAM technology, can run large-scale AI algorithms while being up to 1,000 times more energy efficient than traditional computing methods [3]. This capability opens up new possibilities for deploying AI in compact devices, such as drones, wearables, and IoT applications
The integration of neuromorphic chips into robotic systems holds promise for a wide range of applications. As robots become more sophisticated, the need for intelligent perception, decision-making, and adaptability grows. Neuromorphic computing can enhance these capabilities in several ways.
Autonomous navigation and control
Neuromorphic processors are particularly well-suited for autonomous navigation tasks. By processing sensory data in real-time, robots can make quick decisions based on their environment. For instance, researchers at Delft University of Technology developed a drone that utilizes neuromorphic vision and control systems, allowing it to navigate autonomously with remarkable agility and efficiency [2]. The drone’s ability to process visual information using spiking neural networks enables it to respond rapidly to changes in its surroundings, mimicking the flight patterns of insects.
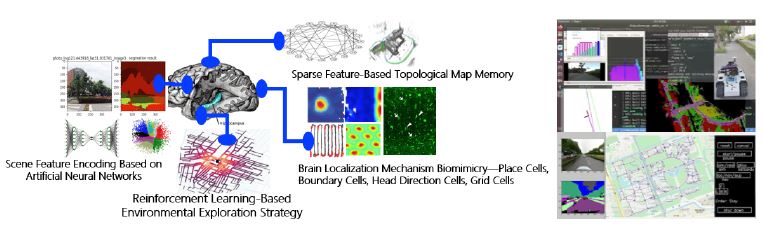
The core issue is to address the problem of autonomous exploration and environmental recognition by unmanned systems, and achieving self-location/navigation under conditions where prior geographic information is missing and satellite navigation is unavailable. The technical Advantages include: A navigation system that does not require precise geometric calculations; Simulating animal navigation behaviors and integrating biological positioning with artificial neural network technologies to construct a navigation system; Robust to environmental changes; Online learning and mapping in unfamiliar environments.
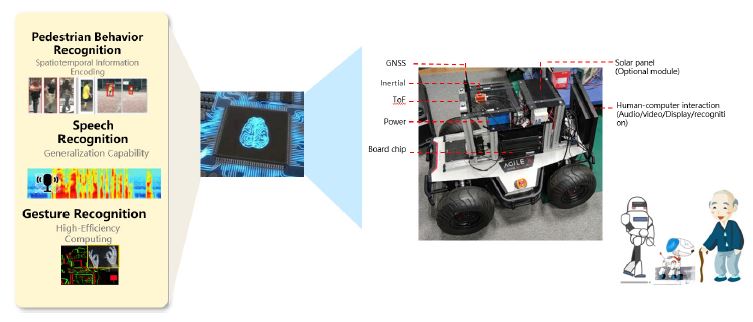
Human-robot interaction
Another significant application of neuromorphic computing is in enhancing human-robot interaction. Robots equipped with neuromorphic chips can interpret and respond to human cues more naturally. For example, neuromorphic systems can process audio signals to recognize speech patterns and respond appropriately, facilitating smoother interactions in service robots or healthcare applications. The ability to learn from interactions and adapt to user preferences further enhances the potential for these robots to function effectively in diverse environments.
Real-time learning and adaptation
Neuromorphic chips also enable continuous learning, allowing robots to adapt to new tasks or environments without extensive retraining. This capability is crucial for robots operating in dynamic settings, such as warehouses or disaster response scenarios, where conditions can change rapidly. By leveraging the event-driven nature of SNNs, robots can learn from their experiences in real-time, improving their performance over time.
Edge computing and IoT integration
As the Internet of Things (IoT) continues to expand, the need for efficient edge computing solutions becomes more pronounced. Neuromorphic chips are ideally suited for edge AI applications, where low power consumption and real-time processing are essential. By performing computations locally, these chips reduce the need for data transmission to centralized servers, enhancing privacy and reducing latency. This capability is particularly beneficial for applications in smart cities, environmental monitoring, and autonomous vehicles.
Despite the promising potential of neuromorphic computing, several challenges remain. The development of standardized architectures and programming frameworks for neuromorphic chips is still in its infancy, which can hinder widespread adoption. Additionally, while neuromorphic systems excel at specific tasks, their performance in more generalized AI applications remains an area of active research [4].
Future advancements in neuromorphic hardware and algorithms will likely focus on enhancing the scalability and flexibility of these systems. As researchers continue to explore the integration of neuromorphic chips with other technologies, such as quantum computing and advanced sensors, the potential for creating highly intelligent and adaptable robotic systems will expand [5].
Brain-inspired chips represent a revolutionary advancement in the field of robotics and AI. By emulating the architecture and functionality of the human brain, neuromorphic processors offer unparalleled efficiency in power consumption, learning capabilities, and computational speed. As the demand for intelligent and adaptable robotic systems grows, the integration of neuromorphic computing will play a crucial role in shaping the future of robotics. The ongoing research and development in this area hold the promise of creating robots that can operate autonomously, learn continuously, and interact naturally with their environments, paving the way for a new era of intelligent machines.
